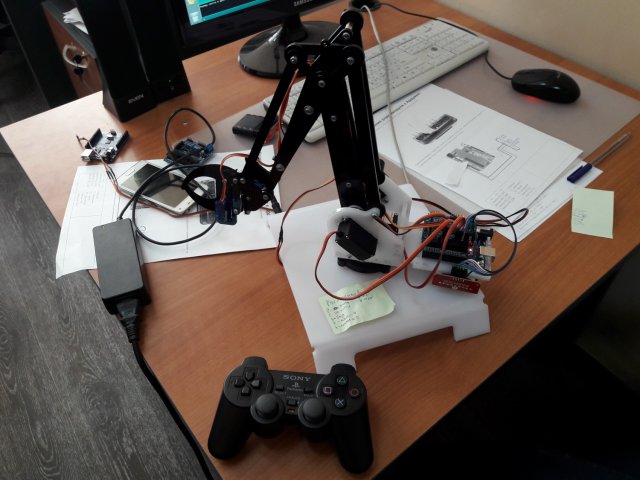
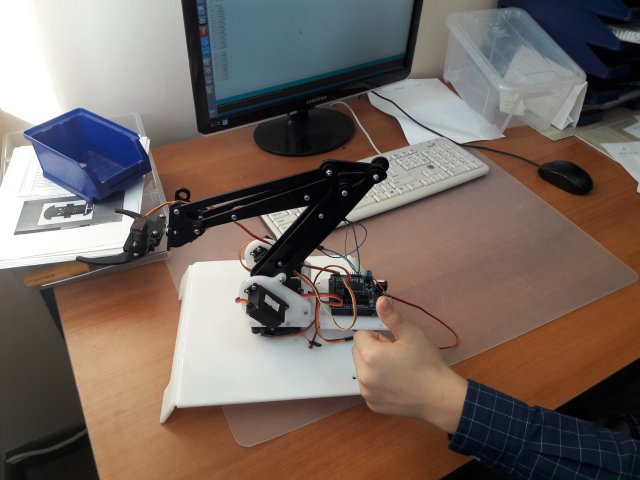
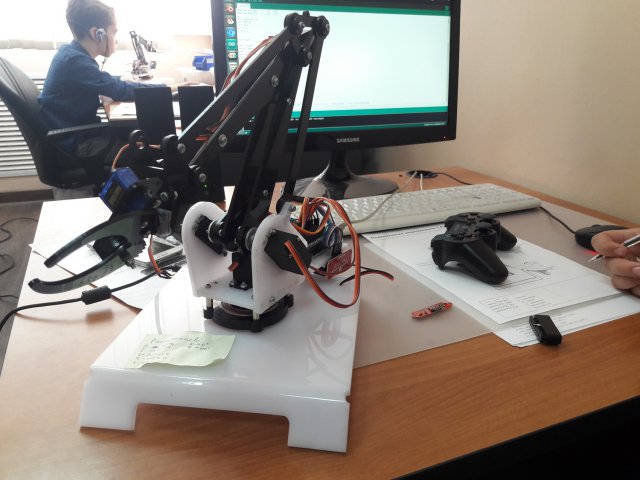
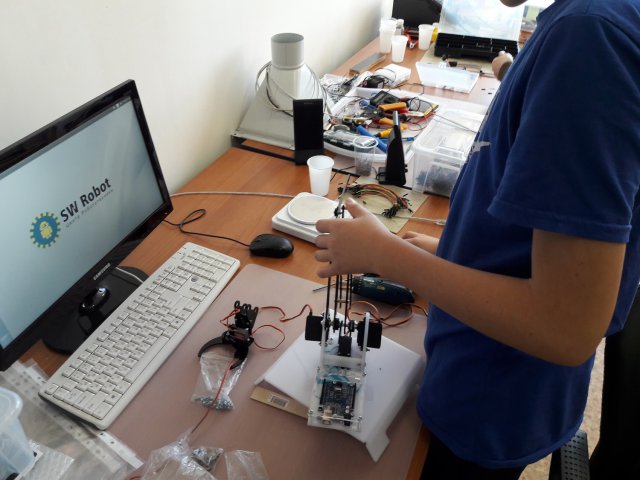
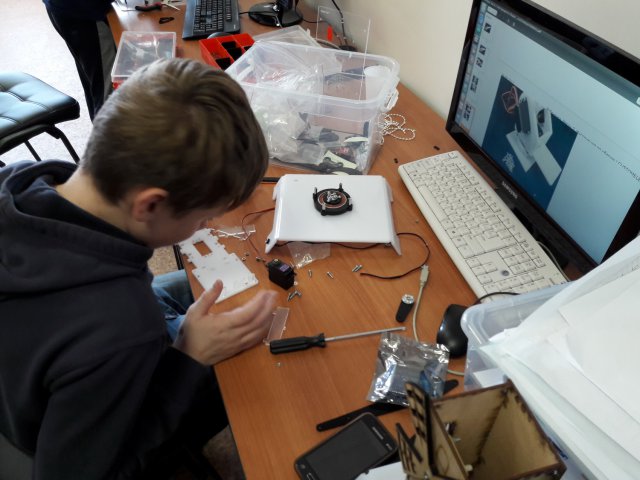
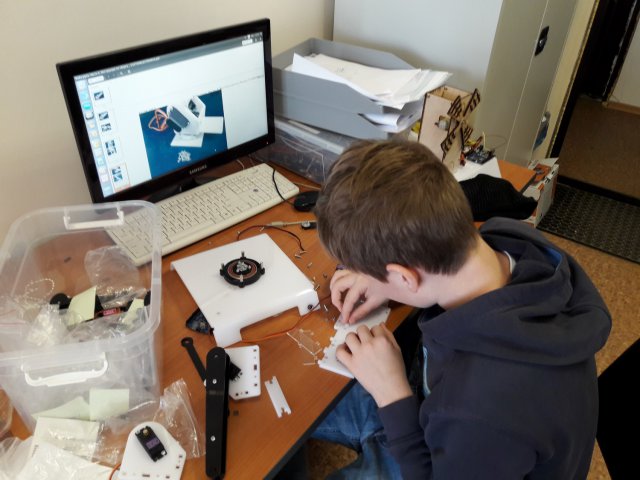
Материал исполнения конструкции это чёрный и белый акрил толщиной 3 и 5 мм соответственно нарезанный на лазерной резаке в нашей лаборатории . В проекте использовано 5 сервомоторов а это значит наш манипулятор имеет 5 степеней свободы (5DOF говоря языком робототехники), на нагруженные части механики мы ставим сервы MG996 они имеют металлический планетарный механизм и вполне держат даже большую нагрузку чем мы используем в нашем проекте. На захват и поворотно-кулачковый механизм руки мы поставили простые SG90 моторы в полностью пластиковом исполнение.
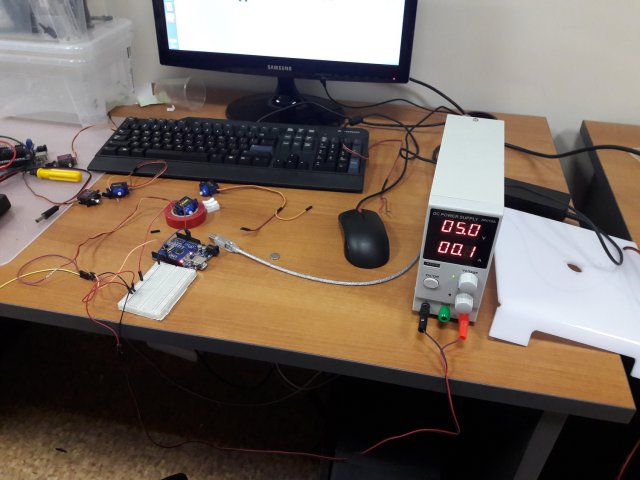
Источником питания является мощный блок питания в ноутбучном исполнении с характеристиками 5В и 5А.
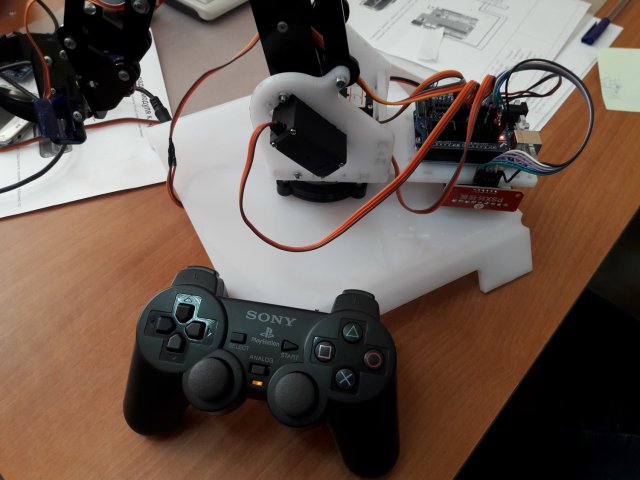
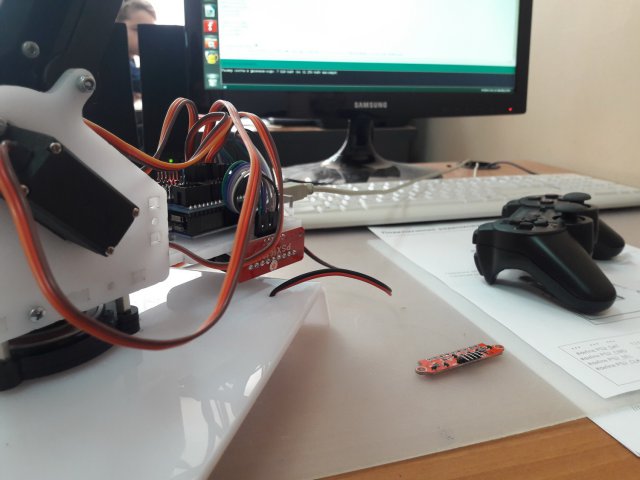
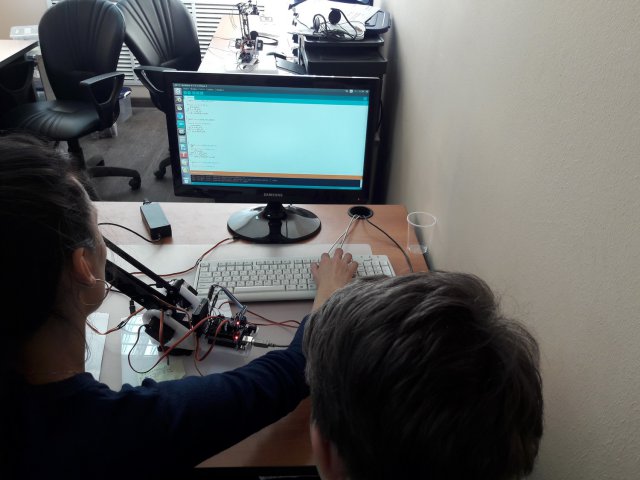
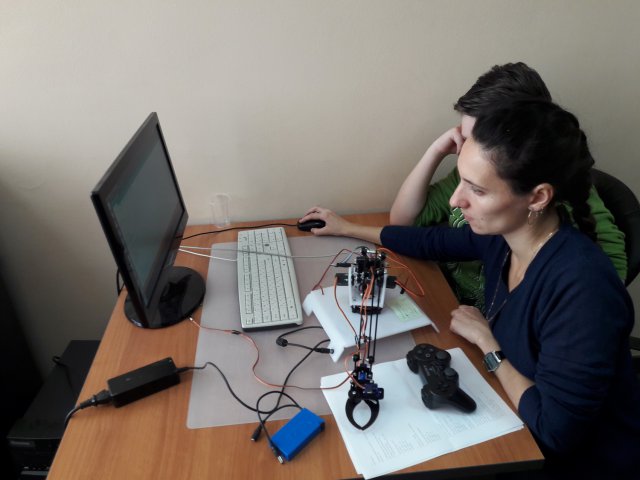
Электроника управления : Arduino UNO + Servo Shield + PS2 радио модуль + Джойстик
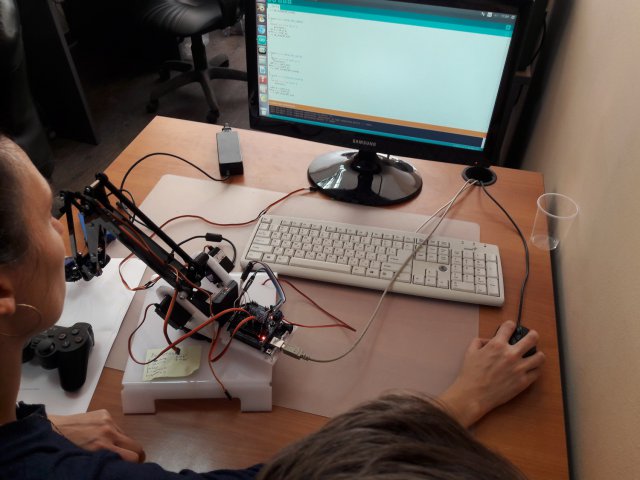
В случаи программирование на Arduino IDE дети пишут код на основе родной Servo library . Тот кто работает в Scratch (S4A) тот использует прошивку отдельно созданную нами для возможности управления от 4 до 6 сервами одновременно.












 Записать ребёнка в секцию
Записать ребёнка в секцию

